
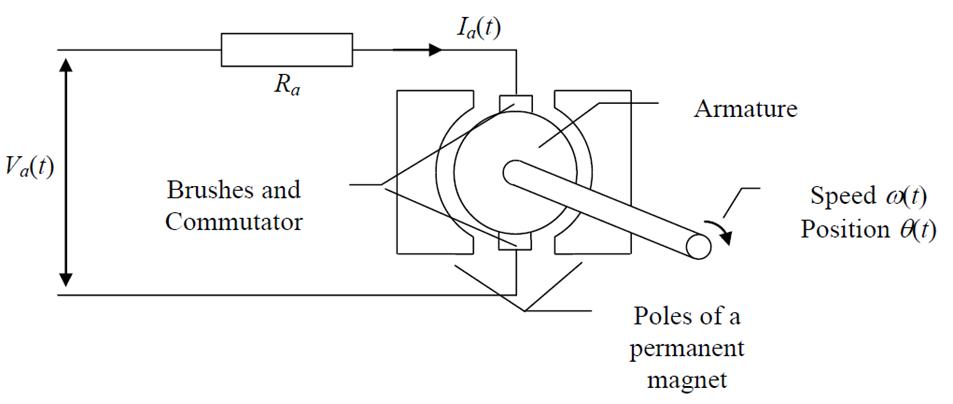
Modeling and Control of a DC Motor
1 (a) Where Va(t) is the Input Armature Voltage and outputs 0(t) is the Position and W(t) is motor velocity. […]
1 (a) Where Va(t) is the Input Armature Voltage and outputs 0(t) is the Position and W(t) is motor velocity. […]
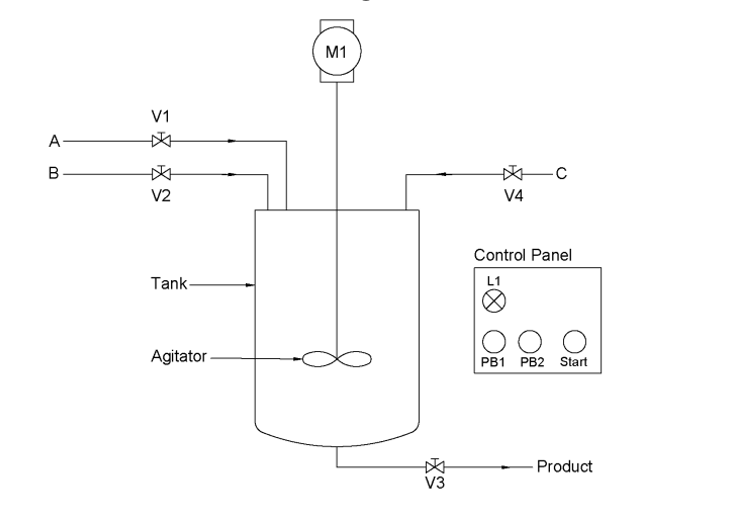
1 Introduction The purpose of this project was to create a suitable ladder logic program to control the process of